
|
悩み |
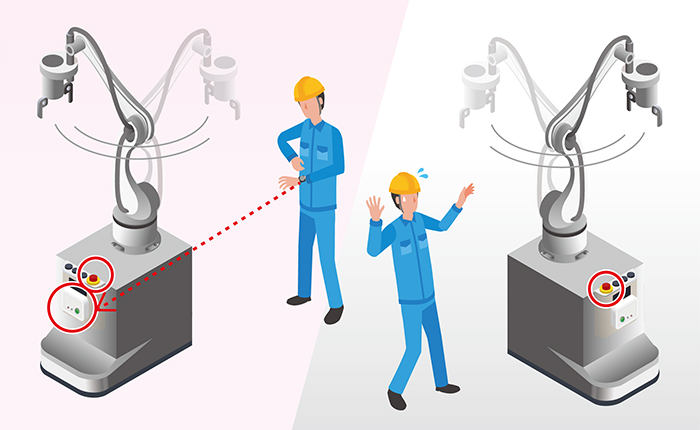
AGV/AMRに搭載した協働ロボットが予期せぬ動作をした場合、非常停止スイッチに近づけない |
|---|---|
|
現状の対策 |
協働ロボット用のティーチングペンダント及びリスクアセスメントを実施し、付加保護方策として非常停止スイッチを取り付けている |
|
解決方法 |
近くの方が送信機を装着することで、ロボットに近寄ることなく非常停止操作をすることができる |
|
悩み |
・AGVの積載物の形状が不安定で重量があると近寄れない |
|---|---|
|
現状の対策 |
・セーフティレーザスキャナで全周をセンシングし、そのエリアに入ると止まる |
|
解決方法 |
・近くで作業される方が送信機を装着することで、とっさの際に押すことでAGVを止めることができる |
Lorem Ipsum Dolor
Lorem Ipsum Dolor
Lorem Ipsum Dolor
Lorem Ipsum Dolor